4-1-1 Kitakaname, Hiratsuka, Kanagawa, 259-1292, Japan
RESEARCH
1. Power Assist Suit with Hardware-based Safety Devices
We have proposed a power assist suit with a velocity-based safety device
and a commercial torque limiter (Fig. 1) . The suit assists a patient’s
knee joint. The velocity-based safety device switches off the robot suit’s
motor if it detects an unexpected high joint angular velocity. The torque
limiter cuts off the torque transmission if it detects an unexpected high
joint torque. These devices will work even when the computer breaks down,
because they consist of only passive mechanical components without actuators,
controllers, or batteries.
本研究室では,2つのハードウェアベースの安全装置(速度ベース安全装置とトルクリミッタ)を搭載したパワーアシストスーツを開発してきている(Fig.1).
そのアシストスーツは患者の膝関節をサポートする.速度ベース安全装置はアシストスーツの予期しない高速度を検知するとモーターの電源をカットしてアシストスーツを停止させる.トルクリミッタは予期しない関節トルクを検知するとモーターからのトルクの伝達を遮断する.以上の安全装置は,アクチュエーター,コントローラー,バッテリーを必要とせず,受動機械要素のみで構成されるので,アシストスーツのコンピュータが故障したとしても機能する.

Fig.1 Power Asssist Suit with Safety Devices
2. Human-friendly Robot with Hardware-based Safety Devices
We have developed a human-friendly robot with hardware-based safety devices
(Fig.2). The safety device consists of only mechanical components without
actuators, controllers, or batteries.The safety device is attached to each
drive-shaft of the robot. If the safety device detects an unexpected high
angular velocity of the drive-shaft, the device stops the robot.
本研究室では,ハードウェアベースの安全装置を搭載したサービスロボットを開発してきている(Fig.2). その安全装置はアクチュエーター,コントローラー,バッテリーを必要とせず,受動機械要素のみで構成される.ロボットの各駆動軸に安全装置は取り付けられる.もし,予期せぬ駆動軸の速度が安全装置によって検知されると,安全装置はロボットを停止させる.
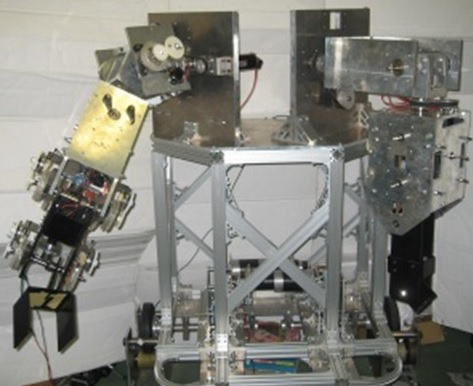
Fig.2 Service Robot with Safety Devices
3. Walking Support Robot with Hardware-based Safety Devices
We have developed a walking support robot with hardware-based safety devices
(Fig.3). The safety device consists of only mechanical components without
actuators, controllers, or batteries.The safety device is attached to each
drive-shaft of the robot. If the safety device detects an unexpected high
angular velocity of the drive-shaft, the device stops the robot.
本研究室では,ハードウェアベースの安全装置を搭載した歩行訓練ロボットを開発してきている(Fig. 3). その安全装置はアクチュエーター,コントローラー,バッテリーを必要とせず,受動機械要素のみで構成される.ロボットの各駆動軸に安全装置は取り付けられる.もし,予期せぬ駆動軸の速度が安全装置によって検知されると,安全装置はロボットを停止させる.

Fig.3
Walking Support Robot with Safety Devices
4. Walking Support System Controlled by Servo Brakes
We have developed a passive-type walking support system which provides
a patient with partial body weight support and prevents the patient from
falling down (Fig. 4). This walking support system is intrinsically safe,
because this system consists of only passive components with no active
actuators. The system has a constant force spring and two electromagnetic
powder brakes. The constant force spring is used in order to provide the
patient with partial body weight support. The powder brakes, which can
control the torque, are used in order to prevent the patient from falling.
本研究室では,患者の体重をサポート(免荷)し,患者の転倒を防止する受動タイプの歩行支援システムを開発してきている (Fig. 4).この歩行支援システムは,アクチュエータを持たず,受動要素のみで構成されるので,本質的に安全である.本システムは定荷重バネと2つのパウダーブレーキを有する.定荷重バネは患者の体重を免荷するために用いられる.トルクを制御できるパウダーブレーキは患者の転倒を防止するために用いられる.

Fig.4
Walking Support System Controlled by Servo Brakes
バナースペース
Kai Laboratory (甲斐研究室)
TEL 0463-58-1211
FAX 0463-59-2207
LOCATION
4-1-1 Kitakaname, Hiratsuka,
Kanagawa,259-1292, Japan
〒259-1292
神奈川県平塚市北金目4-1-1
